Функциональная схема устройства контроля нагружения опор
Функциональная схема устройства контроля нагружения опор.
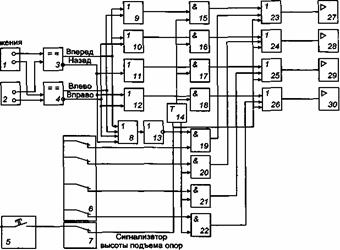
При достижении платформой заданной высоты, фиксируемой размыканием кнопки 5, либо контакта сигнализатора высоты подъема платформы 7 на его выходе и выходе схемы И (23 - 26) появляется сигнал логического 0.
Из-за неровностей местности и различной скорости выдвижения опор платформа будет иметь наклон (например, в сторону, обозначенную вектором ОМ при наиболее высоком положении опоры 7. Сигналы измерителя угла наклона 7 и сигналы задатчика 2 образуют сигнал логической 1 на выходах Вперед и Вправо компараторов 3, 4 и сигналы логического 0 на выходах Назад и Влево. В результате по меньшей мере на одном из входов схем ИЛИ 9, 10 и 11 появится сигнал логической 1, тогда как на входах схем 12 будут сигналы логического 0.
В результате на выходах схемы И 18 и соответственно ИЛИ 26, подключенной к усилителю 30, будут сигналы логического 0, и выдвижение опоры 7 прекратится. С выходов схем 9, 10 и 11 сигналы логической 1 поступают на входы схем И 15, 16 и 17, на другие входы которых приходят сигналы логической 1 от триггера 14, установленного в это (первоначальное) состояние, и сигнализатора высоты подъема опор пусковым сигналом от кнопки 5 (через нормально замкнутый контакт сигнализатора 7).
Таким образом, сигналы логической 1 на входах и выходах схем 23, 24 и 25 обеспечивают через усилители 27, 28 и 29 дальнейшее выдвижение других опор (4, 5 и 6).
При достижении следующей, например опорой 6, высоты опоры вектор ОМ преобразуется в вектор ОN, а сигнал Вправо (сигнал логической 1) с выхода компаратора 4 исчезнет, на выходах схем 11, 17 и 25 появится сигнал логического 0, и выдвижение опоры 6 прекратится.
При достижении следующей из опор (например, 5) высоты опоры 7 вектор ОМ преобразуется в точку О (с погрешностью, определяв мой зоной нечувствительности компараторов), появится сигнал Вперед на выходе компаратора 3 (сигнал логической 1), на выходе схем И 15, 16 и схем ИЛИ 23, 24 будут сигналы логического 0, и выдвижение опор в первом цикле выдвижения прекратится. Выдвижение же ненагруженной опоры 4 будет продолжаться по сигналу, образованному в соответствии со следующими условиями.
При установке платформы в заданное положение сигналы на выходе компараторов 3, 4 и входах схемы ИЛИ 8 имеют сигнал логического 0. На входе инвертора 13 такой же сигнал, а на его выходе сигнал логической 1. Этот сигнал переводит триггер 14 в положение, когда на его выходе будет иметь место сигнал логического 0, блокирующий прохождение сигналов через схемы 15 - 18. Одновременно сигнал логической 1 с выхода инвертора 13 появляется на входах схем И 19 - 22, на другие входы которых поступают сигналы с блока 6 сигнализаторов давления в опорах.
Причем в этот момент сигнал логической 1 (контакт замкнут на шину питания высокого уровня) появляется только в цепи управления ненагруженной опорой (опора 4). В результате на выходе схемы И 19, входе и выходе схемы ИЛИ 23 появится сигнал логической 1, обеспечивающий выдвижение «висячей» опоры 4 до момента ее нагружения (исчезновения сигнала логической 1 на входе схемы И 19 или незначительного, с погрешностью срабатывания компаратора, нарушения установки платформы) и явление сигнала логической 1 на входе и выходе схемы ИЛИ 8 и сигнала логического 0 на выходе инвертора 13.
С исчезновением последнего сигнала логической 1 на входах схем ИЛИ 23 - 26 выдвижение опор прекращается, и они фиксируются заданном положении.
- - - - - - - - - - - - - - - - - - - -
|
|